2025. 3. 28. 22:55ㆍAI(Artificial Intelligence)/자율주행 및 라이다
https://github.com/engcang/SLAM-application
GitHub - engcang/SLAM-application: LeGO-LOAM, LIO-SAM, LVI-SAM, FAST-LIO2, Faster-LIO, VoxelMap, R3LIVE, Point-LIO, KISS-ICP, DL
LeGO-LOAM, LIO-SAM, LVI-SAM, FAST-LIO2, Faster-LIO, VoxelMap, R3LIVE, Point-LIO, KISS-ICP, DLO, DLIO, Ada-LIO, PV-LIO, SLAMesh, ImMesh, FAST-LIO-MULTI, M-LOAM, LOCUS, SLICT, MA-LIO, CT-ICP, GenZ-IC...
github.com
해당 깃허브의 리드미 튜토리얼을 따라 수행했다.
의존성 부분에서 에러가 난 것이라 단계별로 업로드를 해본다.
우선 패키지 의존성부터 설치를 해준다
$ sudo apt-get install -y ros-noetic-navigation ros-noetic-robot-localization ros-noetic-robot-state-publisher(결과 화면을 띄우고 싶었는데 이게.. 리눅스가 스크롤이 너무 커지면 vmware가 지원을 안 해준다..)
CMake 명령어를 사용하는거라 버전을 최소 버전은 맞춰준다. 여기서는 3.20 이상을 원하는 거 같다.
$ wget https://github.com/Kitware/CMake/archive/refs/tags/v3.31.3.tar.gz
$ tar zxf v3.31.3.tar.gz
$ cd CMake-3.31.3 #CMake-3.31.3으로 진입
$ ./bootstrap #bootstrap 실행
$ make
$ sudo make install #make 명령어를 설치GTSAM(LVI-SAM, LIO-SAM) : 로봇 비전에서 자주 쓰이는 라이브러리. LVI-SAM는 LIO-SAM 의 확장 버전으로 카메라 센서를 지원하고, 두 모델 다 실시간 3D SLAM 라이브러리에 해당.
$ wget -O gtsam.zip https://github.com/borglab/gtsam/archive/4.0.2.zip
$ unzip gtsam.zip
$ cd gtsam-4.0.2/
$ mkdir build && cd build
$ cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF -DGTSAM_USE_SYSTEM_EIGEN=ON ..
$ sudo make install -j8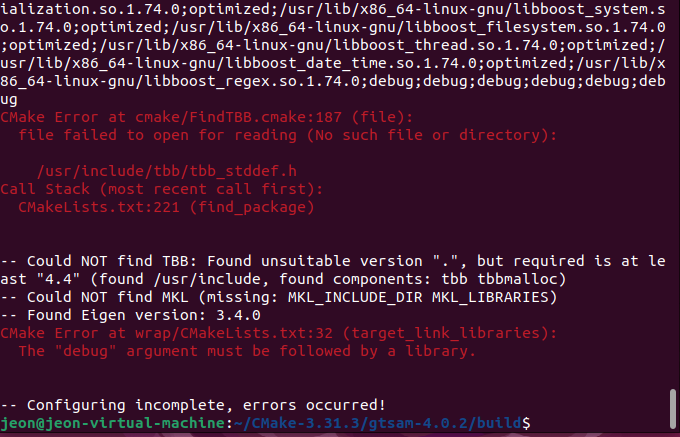
따라서, tbb 4.4이상을 다운로드 해주는 명령어를 써주었다.
sudo apt update
sudo apt install libtbb-dev문제는, vcpgk 설치 경로를 입력해줘야하는데, 아무리 찾아봐도 나타나지 않아서 git clone으로 설치를 진행해준다.
git clone https://github.com/microsoft/vcpkg.git
cd vcpkg
./bootstrap-vcpkg.sh
어라... 안 된다 ㅠㅠㅠㅠㅠㅠㅠㅠㅠㅠ 일단 여기까지 진행해두었다....
'AI(Artificial Intelligence) > 자율주행 및 라이다' 카테고리의 다른 글
| [It’s Study 7주차] Fast-LIO 실습해보기(실패) (0) | 2025.04.11 |
|---|---|
| [It's Study 6주차] RTAP-MAP 설치 실패,,, (0) | 2025.04.04 |
| [IT's Study 4주차] 스마트시티와 CARLA (0) | 2025.03.21 |
| [IT's Study 3주차] 자율주행 관련 AI 모델 : DGCNN(2) (0) | 2025.03.07 |
| [IT's Study 3주차] 자율주행 관련 AI 모델 : PointNet (1) (0) | 2025.02.25 |